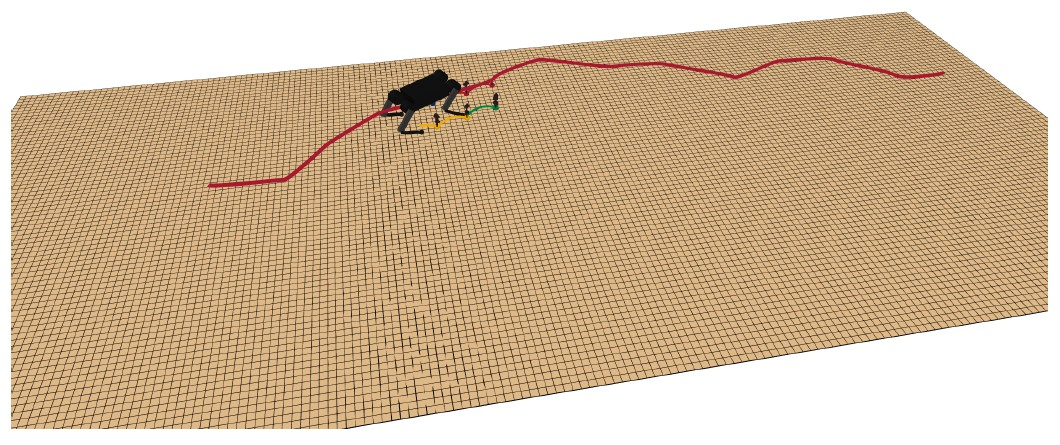
Quadruped Path Planner for Dynamic Environments
Implemented a global path planner for a quadruped robot moving in dynamic environments.

Implemented a global path planner for a quadruped robot moving in dynamic environments.
Developed a reinforcement learning agent using Proximal Policy Optimization (PPO) to play the pinball game Total Nuclear Annihilation.

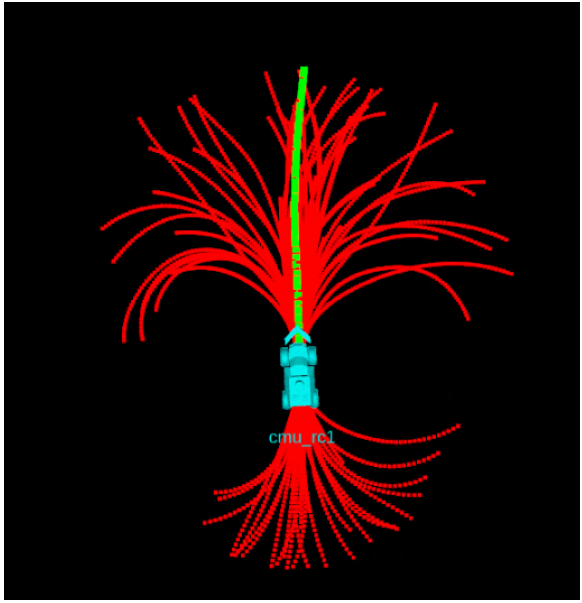
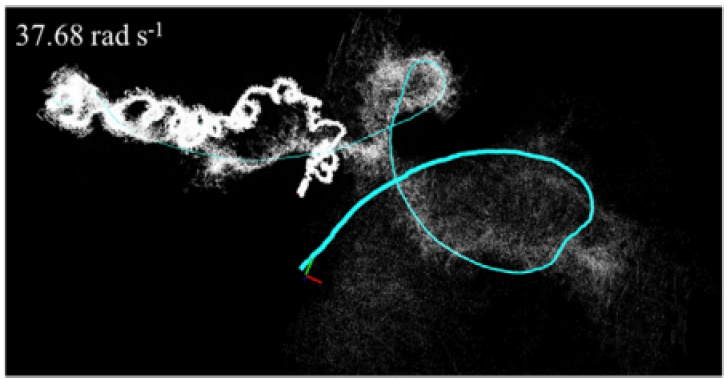
Implemented MPPI on an RC car platform using C++ and ROS to enable aggressive driving.
Implemented Point-LIO from scratch to overcome the drawbacks of scan-based LiDAR processing.
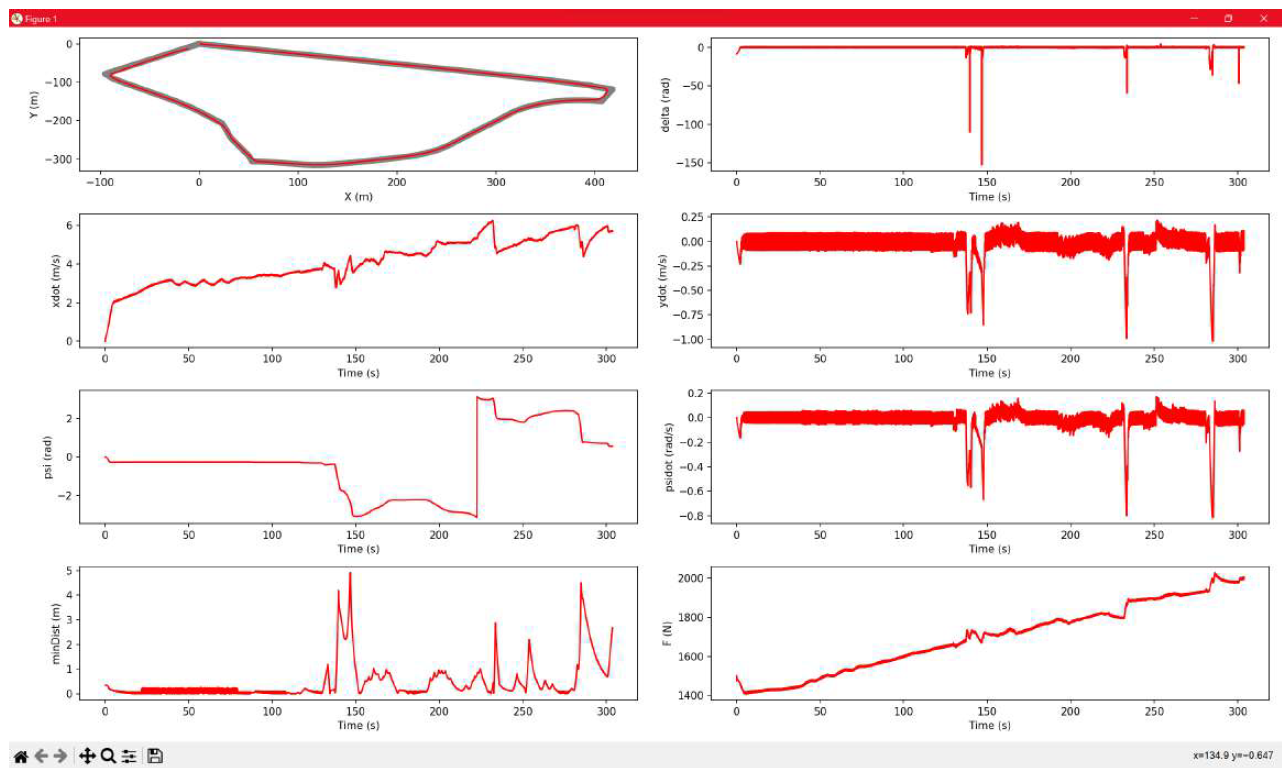
Implemented various control techniques on a racecar simulation.
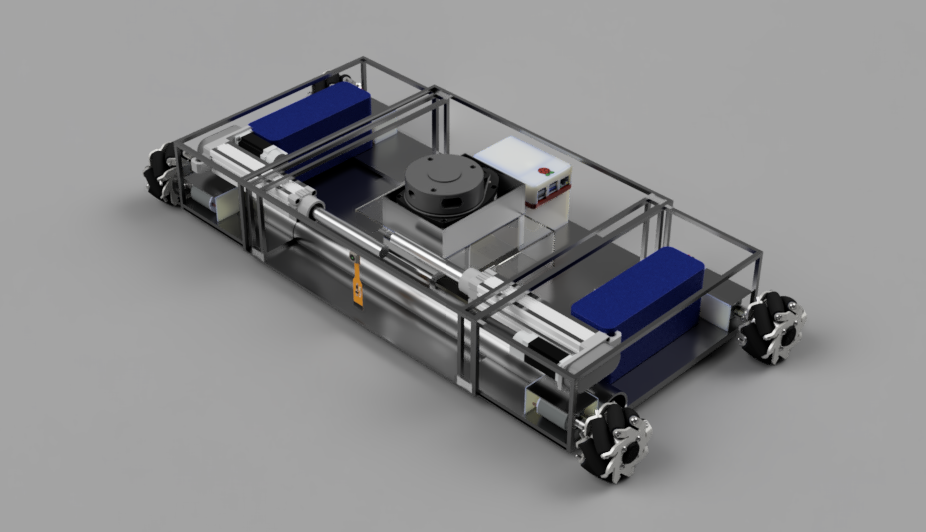
Designed a Floor Cleaning Robot that can adjust its size depending on need.
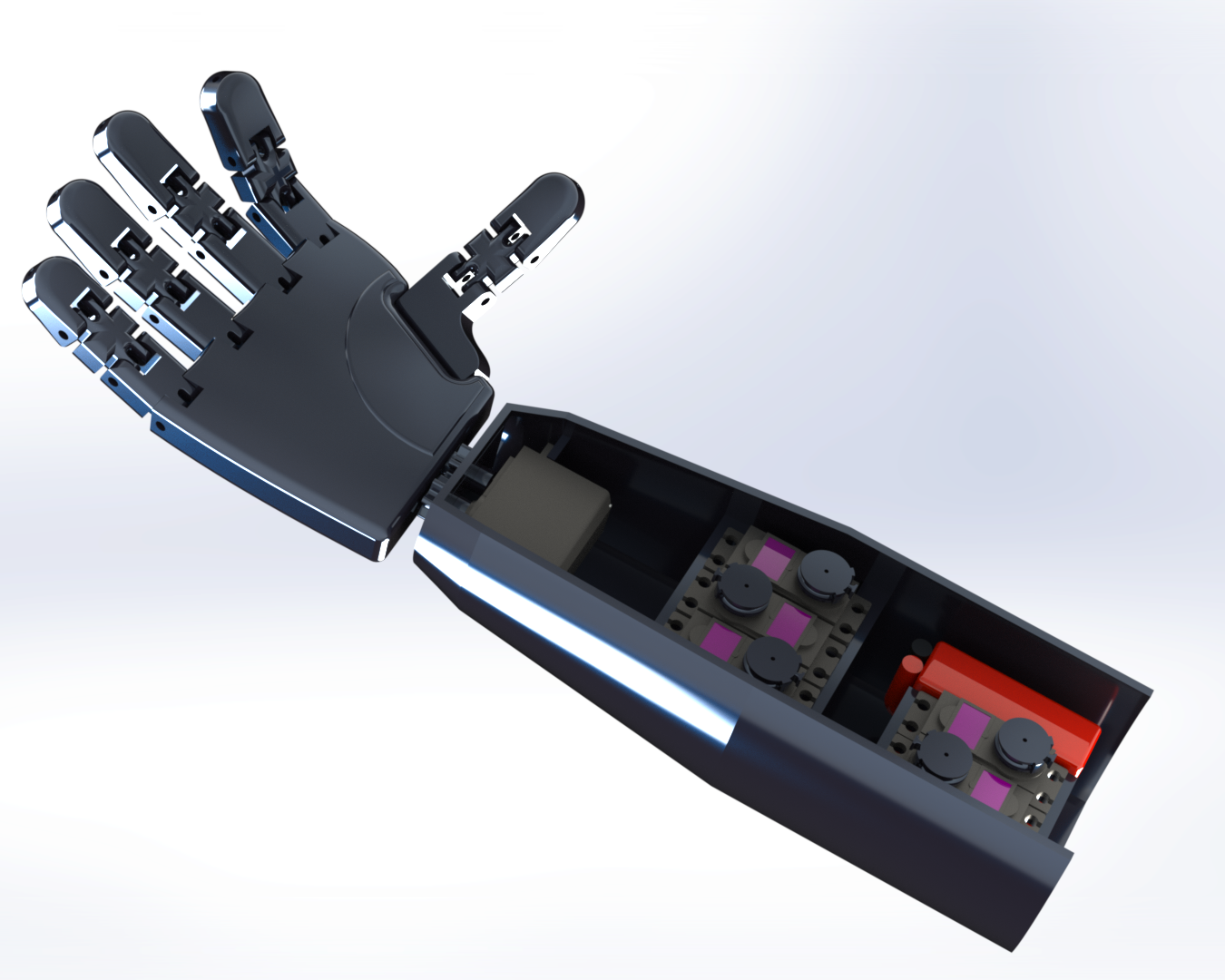
Performed Topology Optimization to reduce the material cost of a Prosthetic Arm.