Quadruped Path Planner for Dynamic Environments
Implemented a global path planner for a quadruped robot moving in dynamic environments.
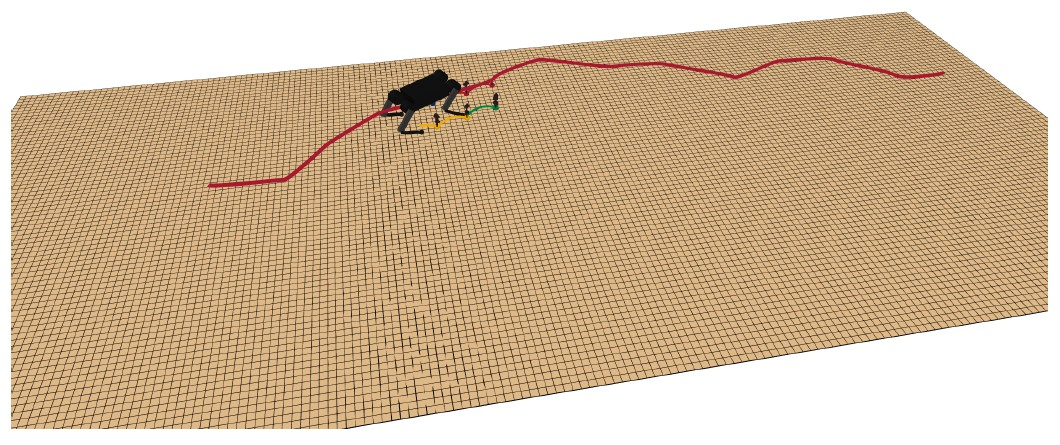

Implemented a global path planner for a quadruped robot moving in dynamic environments.
Developed a reinforcement learning agent using Proximal Policy Optimization (PPO) to play the pinball game Total Nuclear Annihilation.

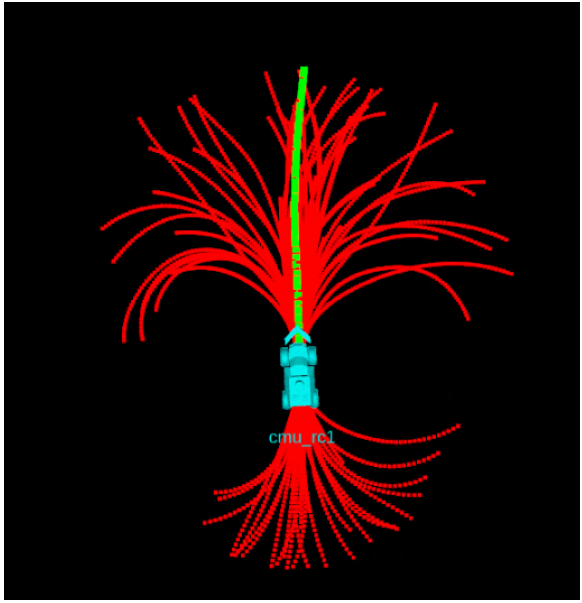
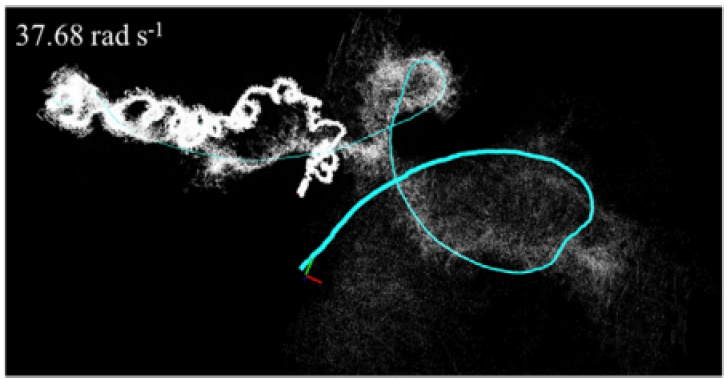
Implemented MPPI on an RC car platform using C++ and ROS to enable aggressive driving.
Implemented Point-LIO from scratch to overcome the drawbacks of scan-based LiDAR processing.
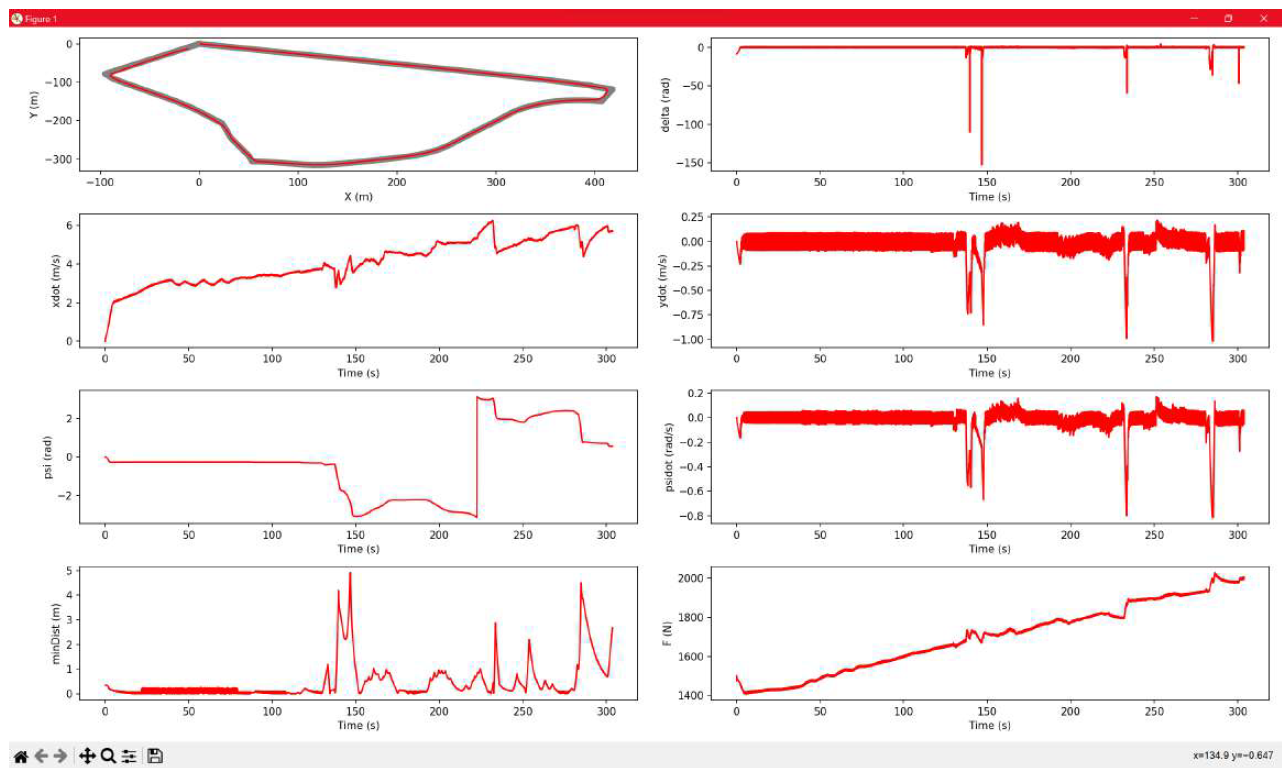
Implemented various control techniques on a racecar simulation.
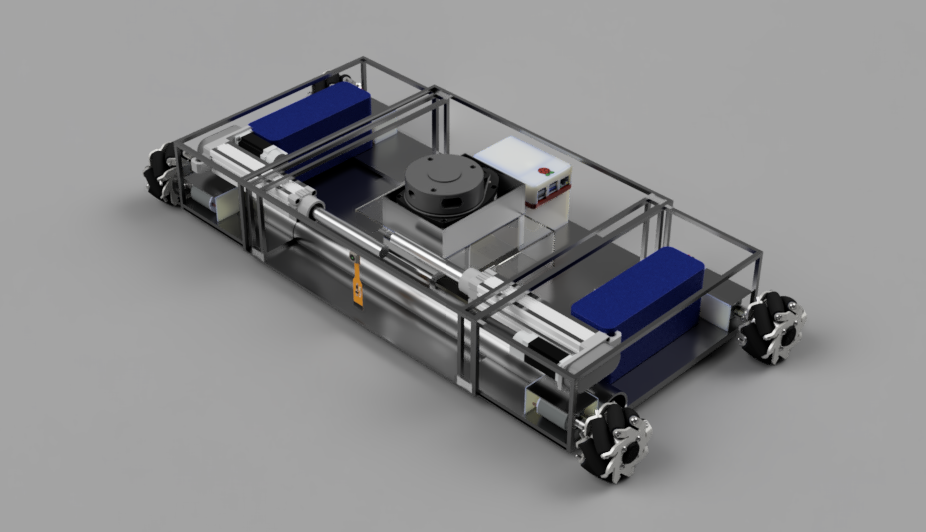
Designed a Floor Cleaning Robot that can adjust its size depending on need.
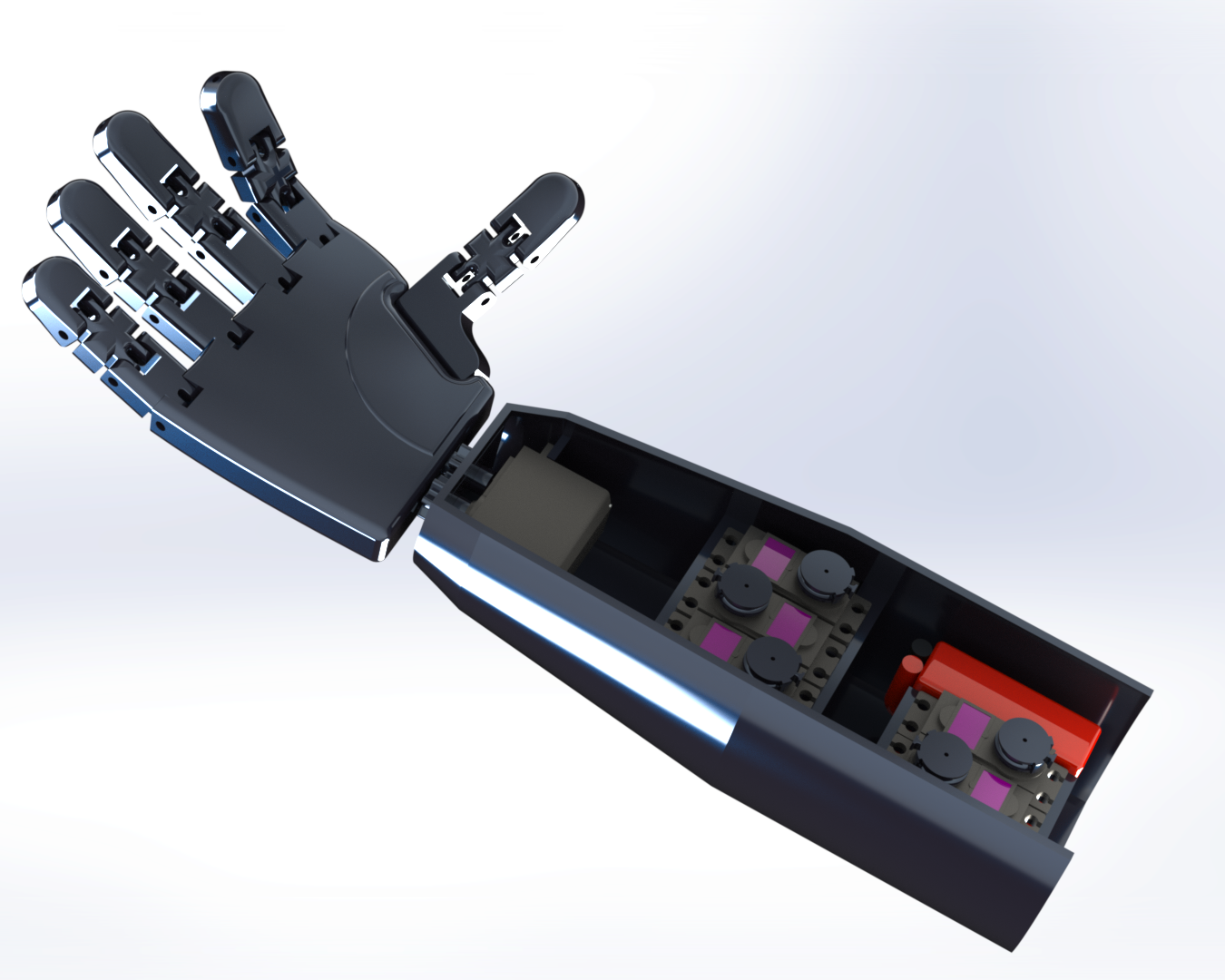
Performed Topology Optimization to reduce the material cost of a Prosthetic Arm.
This paper focuses on communications-aware behaviors that enable formations of robotic agents to travel through communications-deprived environments while remaining in contact with a central base station.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.